The purpose of the exercise was to navigate to different waypoints at the Priory using the maps we constructed in Field Exercise 5. The exercise developed our skills using a compass and navigation techniques. The skills learned in this exercise will be beneficial for any career in the geospatial workforce, especially an outdoor-related career.
Study Area:
The navigation exercise was carried out at the Priory, which is a large nature reserve that has a student housing building in the middle of the property. The terrain is very hilly, and covered with trees, bushes, and prickly plants. The reserve is 8 minutes away from UW-Eau Claire, and is located on Priory Road (Figure 1). A large-scale map of the area can be seen in Figure 2.
 |
| Figure 1: The Priory is located 8 minutes away from UW-Eau Claire. |
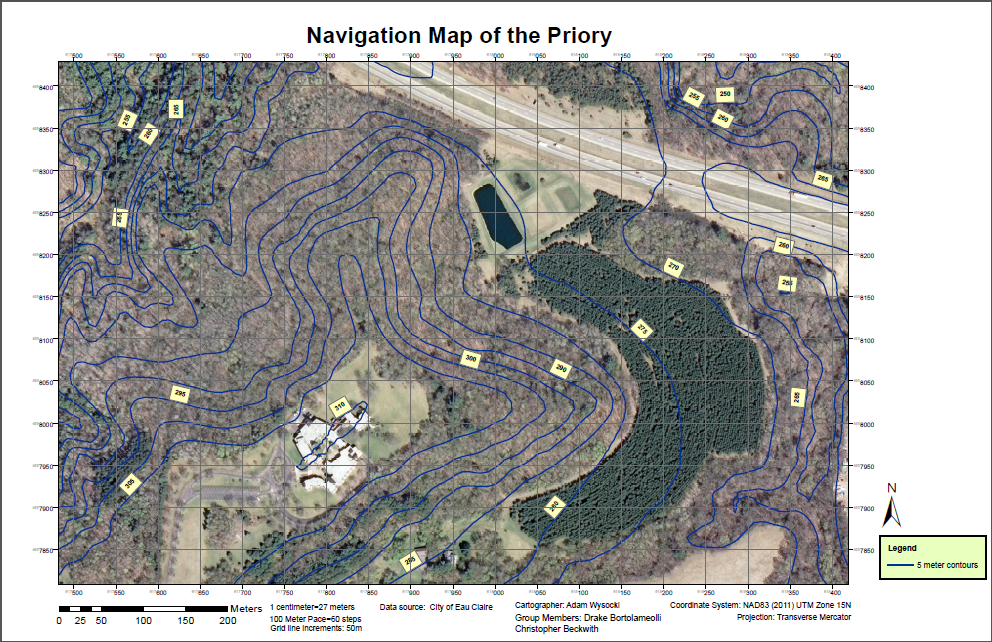 |
| Figure 2: The large-sclae map shows the hilly and vegetated terrain of the Priory. This UTM map, created by our group, was the map primarly used in navigating the Priory. |
Methods:
The UTM map of the Priory, which our group created in Field Exercise 5, was the map our group used to navigate around the Priory. Upon arrival at the Priory, Dr. Hupy gave each group 5 pairs of geographic coordinates to locate. We plotted the points using the labeled graticules on our maps.
After the points were drawn on the map, a compass was used to determine the bearing, or azimuth, from the starting point in the parking lot to the first waypoint (Figure 3). To determine azimuth, we first needed to create a straight line between the starting point and the first coordinate points. A piece of paper was used to make the straight line. Next, we orientated the "direction of travel arrow" on the compass to the first coordinate points. After that, we turned the bezel of the compass until the north sign on the bezel faced north on the map (Figure 4). We used the graticule lines to accurately determine north. Finally, we read the bearing number above the bezel to determine our bearing/azimuth (Cherim, 2013). We calculated the azimuth between each set of successive coordinate points before going on foot to find them.
 |
| Figure 3: Geographic coordinates were plotted on our maps and azimuths between successive points were determined using a compass. |
 |
| Figure 4: The above diagram shows the anatomoy of the type of compass we used. Critical components of the compass include the magnetic needle, bezzle, direcion of travel arrow, orientiering arrow, and scales. Image retrieved from: https://nhtramper.wordpress.com/2013/03/31/wilderness-compass-navigation-primer/ |
While navigating, it is not only important to know the direction in which you are walking, but the distance you need to walk. We had determined the distance between each pair of points on the map using the ruler on the bottom of the compass. The map scale was then used to convert map distance to real-world distance (Cherim, 2013). Instead of trying to visualize how far a certain distance was in meters, we used our step counts to figure out approximately how many steps we had to take to reach our destination. For review, a step count is the number of steps a person takes within a certain distance (Conway, 2015). My step count was 60 steps for every 100 meters. Knowing the direction and distance to each waypoint was critical to finding the waypoint before starting our trek.
After determining the azimuth and distance for all waypoints, we headed out on foot to find the waypoints using our maps and compasses. In order to find the waypoints, we used a technique called "red in the shed". This is a process in which you set the your compass to the waypoint's bearing and orientate yourself until the magnetic needle resides in the orientating arrow (Figure 4). After "red is in the shed" you walk in a straight line towards your destination, always making sure to keep "red in the shed" (Cherim, 2013).
During the exercise, we assigned roles to each group member to help keep us on track to our next waypoint. We assigned each person a role of pace counter, azimuth control, or leap frogger. The pace counter was in charge of walking ahead while counting paces to the next waypoint. They had to adjust paces to the terrain, such as adding steps when we walked up hill. The azimuth control was the person with the compass, who made sure to keep our group's bearing as close as possible to the bearing of the waypoint. The azimuth control had to make adjustments to bearing based on the terrain. The leap frogger would walk ahead of our group to a given landmark so the pace counter and azimuth control could keep track of their paces and azimuth. Our group didn’t use the leap frogger very much because we wandered as a group keeping track of our steps and azimuth together. This was not very successful, and next time I believe it would be beneficial to have a leap frogger who walked ahead to help the pace counter and azimuth control keep track of their paces and azimuth.
A global positioning system (GPS) was used to determine our location from time to time if we felt we had strayed off the path to our next waypoint (Figure 5). Once the waypoint was found, the GPS was used to ensure we had found the correct waypoint. We then took a picture of the tree on which the waypoint was based.
 |
| Figure 5: A Garmin etrex, as pictured above, was used in the exercise to track out location during the navigation activity. We also used the etrex to determine our location when we were lost. |
Metadata for the collected GPS information is shown below (Figure 6).
 |
| Figure 6: The metadata documents information about how, when, and where our group navigated during the field exercise at the Priory. |
Discussion:
In this exercise, we learned what parts of our map were useful and not useful. Useful parts of the maps included the aerial imagery, 50 meter graticule lines, scale bar, relative fraction, and 5-meter contour lines. The 50 meter graticules were very helpful in determing the azimuth between points, and also came in handly when we used a GPS to check our location. The aerial imagery was very useful in helping us determine where we where in relation to our waypoint. The scale and relative fraction came in handy many times because it helped us determine approximate distance to our waypoints. The 5-meter contours were decently helpful in determing how far uphill/downhill we had to trek to our destination. We also used the 5-meter contours to determine where hill peaks and valleys were. A map feature that did not come in handy very much was the red-yellow-green digital elevation model on the WGS84 map. It only indicated a few hill peaks, so our groups primarily relied on the UTM map. In the next exercise, I would not add the digital elevation model to the map. I would keep all the other map elements though.
One very important lesson the exercise helped us learn was navigating the terrain in the real world was a lot more difficulut than just following the straight line drawn on the map. The most difficult obstacles were the hills and the prickly bushes. We tried to use our step count and map scales to determine the number of steps we had to take between each set of points. In a totally flat landscape with no obstructions, this would have worked perfectly. The Priory has a very hilly terrain, which caused us to take smaller steps than usual if we walked up hill, or larger steps if we were walking downhill. Additionally, obstructions, such as rocks, prickly bushes, and trees, caused us to veer off course from our bearing. Hills and obstructions made it a lot more difficult to navigate around the Priory. In fact, there were many times we had to estimate how many steps we had taken towards our destination because we had veered off course or went up/down a hill. As a result of our estimations, there were many times we walked the proper number of steps to our destination, and it wasn’t there. We then used our GPS to determine our location, find our location on our map, determine the direction and distance we needed to go, and try again to find our waypoint. Most of the time, we had to try three times before we found the desired waypoint.
We used a GPS to track our paths from waypoint to waypoint (Figure 7). As mentioned before, our group had to try about three times before we found the desired waypoint. For example, Figure 7 shows our path from the starting point to the first point in the northern part of the map. We decided to start at the northern extent of the Priory residentaial building lawn to make our path easier. Starting from there, we headed north into the woods. Somehow, we went too far east of our waypoint, and had to walk to the west to find our first waypoint. We used the GPS to determine our location when we were lost, and were quite surprised to see how far we had gone off track. We finally found the first waypoint, which was marked by a pink flag on a tree (Figure 8).
 |
| Figure 7: The map shows the course taken by our group to the three (out of 5) waypoints we had time to locate at the Priory. Our course shows the struggle our group had in finding the waypoints. |
 |
| Figure 8: The first waypoint was a tree marked by a pink flag. Our group made three attempts to find the tree before finally finding it. |
The next two waypoint were especially hard to find since they weren’t marked in the real world. When we tried to find the second waypoint (southeastern side of the map), we looped around the relative area of the waypoint twice before we resorted to using our GPS to help find the waypoint. We used the GPS to navigate to the exact location of the second waypoint, but no marked tree existed (Figure 9). The same problem happened again when we tried to find the third waypoint, which was also unmarked (Figure 10). By the time our group had found three out of five waypoints, 1.5 hours had passed and we had to call it a day.
 |
| Figure 9: After using the GPS to determine the exact location of the second waypoint, we discovered the waypoint was not marked. |
 |
| Figure 10: The third waypoint was an unmarked oak tree. We had to use the GPS to make sure the tree was the third waypoint. It would have been almost impossible to find the waypoint without the GPS since the waypoint was unmarked. |
Once we went back to the lab, our professor transferred all groups' GPS track logs to a computer as shapefiles. I imported the shapefiles for each group into a geodatabase, and used the shapefiles to create a map of the Priory showing all the paths taken by all groups in the class (Figure 11). The map shows some groups, such as groups 1 and 2, had a hard time finding their points like our group did. Their struggles are demonstrated by the loops in their paths. Other groups seemed to be slightly more successful than our group. For example, group 5 had a relatively straight path from point to point. Overall, most groups only made it to three out of five points, just like our group.
 |
| Figure 11: The map shows the paths taken by six differnet groups in the class. Some groups experienced similar difficulties like our group, while others were more successful. |
Conclusions:
The exercise was very helpful for improving my navigational skills with a map and compass. I learned that many challenges arise while trying to navigate in the field. For exampe, hills cause you to take different-sized steps, prickly bushes get in the way, and sometimes your destination is not marked. I found the hands-on application of the exercise to be very educational and beneficial. Naviagational skills gained through the exercise will be beneficial for any career in the geospatial workforce, especially an outdoor-related career.
Works Cited:
Cherim, Mike. (2013). "Wilderness Compass Navigation Primer". NH Tramper. Retrieved from: https://nhtramper.wordpress.com/2013/03/31/wilderness-compass-navigation-primer/
Conway, Chris. (2015). "Backcountry Navigation". Retrieved from: http://www.backcountryattitude.com/land_navigation.html
No comments:
Post a Comment